Allgemeines
Das Strommodell der Asynchronmaschine beruht auf den Läufergleichungen. Als Basis des Modells wird das invers Gamma ESB herrangezogen. Hierbei sind insbesondere die Läufergleichungen interessant.Um den Fluss und die Orentierung bestimmen zu können werden "nur" die Läuferparameter benötigt.
- r3
- xh
- r3: kann sich bei Erwärmung verdoppeln
- xh: kann sich sättigen
Als Erstes befassen wir uns mit der Berechnung des Flusses
Läufergleichungen in D-Richtung:
- (1) \( 0 = r3 \cdot i3_d + \frac{ d{\Psi}h_d }{\omega_n \cdot dt} \)
Stromsumme in D-Richtung:
- (2) \( i1_d + i3_d = i{\mu}_d \)
Flussgleichung, Hauptfluss:
- (3) \( {\Psi}h_d = xh \cdot i{\mu}_d \)
Einsetzen und umstellen:
- aus (1) und (2) wird dann: \( {\Psi}h_d = r3 \cdot \omega_n \cdot \int ( i1_d - i{\mu}_d ) dt \)
- (3) wird nun nach \( i{\mu} \) umgestellt: \( i{\mu} = \frac{ {\Psi}h_d }{ xh } \)
- das ergibt dann: \( i1_d = \frac{\dot {\Psi}h_d }{r3 \cdot \omega_n} + \frac{{\Psi}h_d}{xh} \)
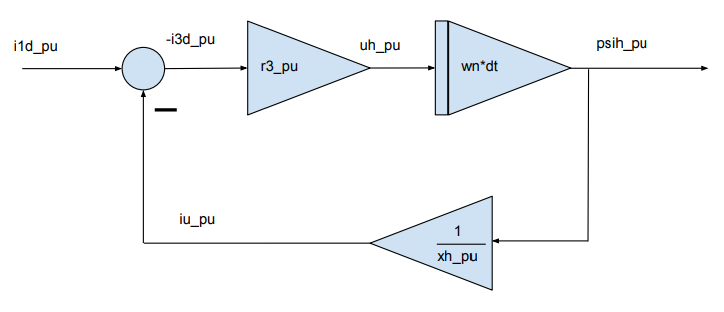
Es ergibt sich strukturiell ein PT1 Glied. Das ganze kann sehr gut auch im Bildbereich dagestellt werden:
- \( \frac { {\Psi}h_d}{i1_d} = G(p) = \frac {xh }{1+p \cdot \frac {xh}{\omega_n \cdot r3} } = \frac {xh }{1+p \cdot \tau_{rot} } \)
Jetzt müssen wir uns noch um die Transformation kümmern.
Dabei wird der Strangstrom der Maschine in das Flusskoordinatensystem reingedreht.
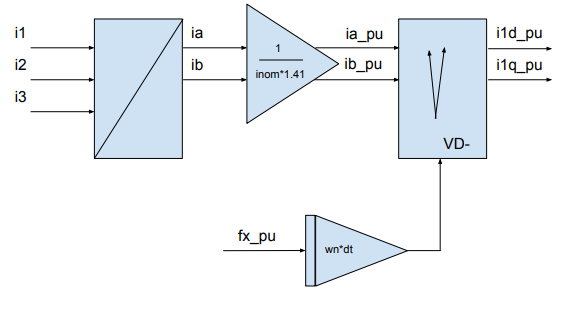
Hierbei bleibt noch die Frage nach der richtigen Frequenz für die Transformation.
- (1) \( 0 = r3 \cdot i3_q + ss \cdot {\Psi}h_d \)
- (2) \( i1_q + i3_q = 0 \)
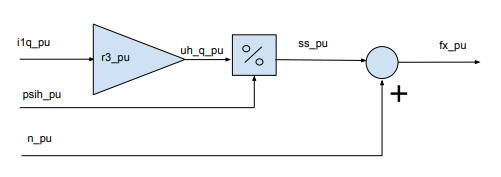
Hieraus kann dann der Schlupf berechnet werden
\( ss = i1_q \cdot \frac {r3}{{\Psi}h_d} \)
Um jetzt die Ständerfrequenz zu bekommen muss noch die mechanische Drehzahl der Maschine dazuaddiert werden
\( fx = n_{mech} + i1_q \cdot \frac {r3}{{\Psi}h_d} \)
Mechanik.
Das Drehmoment berechnet sich klassisch über:
\( M = im( {\Psi}h \cdot i1 ) \)
Da wir feldorientiert fahren und \( {\Psi}h_q = 0 \) ist, bekommen wir:
\( M = {\Psi}h_d \cdot i1_q \)
bzw
\( M = - {\Psi}h_d \cdot i3_q \)
Kleine Rechnereien:
Alle Werte sind in [pu]. Eine Ausnahme bildet der Winkel phi. Der ist in Grad. Strom, Schlupf, xh und r3 können geändert werden.
| \( current \) | \( schlupf \) | \( xh \) | \( r3 \) | \( i1_d \) | \( i1_q \) | \( {\Psi}h_d \) | \( M \) | \( phi \) | iter | |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.3 | 0.0 | 3.1 | 0.02 | ||||||
| 2 | 1.1 | 0.02 | 3.1 | 0.02 |