Alle Aussagen zum Ersatzschaltbild selber bleiben gültig. Dies betrifft auch die Umrechnung der Ersatzelemente (ASM: pu, mech-rotor-orientiert, invGam-ESB).
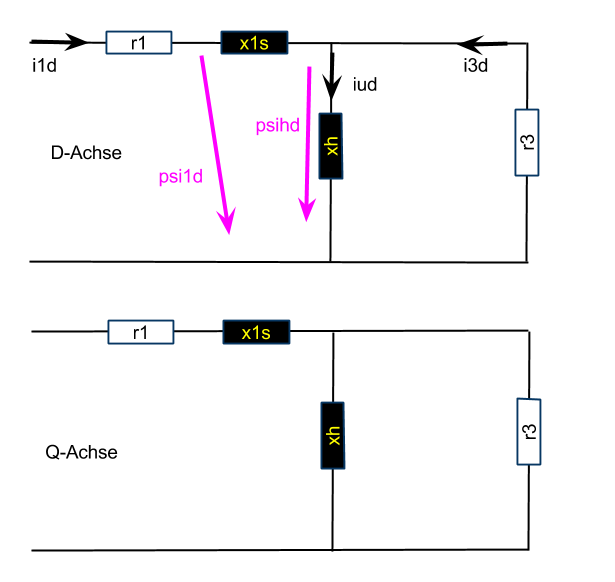
Die Neuerung ist, dass die Orientierung jetzt im Hauptfluss \( {\Psi}h_d \) liegt. Damit ist der Hauptfluss in q-Richtung \( {\Psi}h_q \) aber Null. Ebenso sind die Ableitungen des Hauptflusses in q-Richtung Null.
Zusätzlich gibt es jetzt aber eine Drehzahldifferenz zwischen dem Orientierungspunkt und dem Rotor. Damit werden im Rotor aber auch Feldanteile mit der Schlupffrequenz (Wir erinnern uns: Die Frequenzdifferenz zwischen der Ständerfrequenz und der mechanischen Rotorfrequenz) erzeugt.
Die Orientierung auf den Hauptfluss ändert auch die Bezugsdrehzahl des Orientierungssystems. Jetzt ist diese Orientierungsdrehzahl die Ständerfrequenz.
Dieses Ersatzschaltbild mit der Orientierung auf \( {\Psi}h_d \) ist das klassische Ersatzschaltbild der feldorientierten Regelung
Dafür gibt es auch sehr gute Gründe. Die Orientierung sollte immer auf eine möglichst große Energiemenge erfolgen. Dadurch ist sichergestellt, dass sich ebendiese Orientierung nicht so schnell ändert. Zusätzlich kommt zur Hauptfeldorientierung im invers-gamma Erstazschaltbild hinzu, daß der Hauptfluss elektrich durch den Kurzschlussläufer kurzgeschlossen wird. Da der Fluss aber das Integral einer Spannung ist, und die Spannung im Kurzschlussläufer sehr klein ist, ändert sich der Fluss nur sehr wenig. Dies ermöglicht eine sehr ruhige Orientierung/Regelung.
Die Gleichungen arbeiten alle "pu". Typische Werte:
Die Orientierung des Modells ist d-hauptfeldorientiert.
Die Frequenz ist die Frequenz des Orientierungssystems, die Ständerfrequenz \( \omega_s \).
da es sich um einen Kurschlussläufer handelt, sind die Spannungen 0. Zusätzlich kommt hier zu der einfachen Ableitung noch die Orientierungsfrequenzdifferenz hinzu, dem Schlupf ss.
Die induzierte Spannung ergibt sich zu:Da der Hauptfluss in Q-Richtung aber Null ist ebenso wie dessen Ableitungen, vereinfachen sich die Formel stark.
ACHTUNG: Da dieser Formelsatz auf den Hautfluss in D-Richtung orientiert, muss auch sichergestellt werden, dass immer etwas zu orientieren da ist. Bei einer Integration muss man also darauf achten, dass der Fluss in D-Richtung weder Null noch kleiner 0 wird!
Die zweite Läufergleichung enthält kein Differential. Diese wird hergenommen, um den Schlupf zu berechnen. Damit lässt sich dann bei bekannter Drehzahl die Ständerfrequenz berechnen.
Ständerfluss
Auch hier wird es in Q-Richtung etwas einfacher, da der Fluss in Q-Richtung wegfällt:
Hauptfluss
Der Q-Anteil fehlt wieder:
Wenn es keinen Hauptfluss in Q-Richtung gibt, dann gibt es auch keinen Magnetisierungsstrom in Q-Richtung.
Das Drehoment ist: M = Im{psi*conj(I)}
Auch hierbei gilt: Kein Feld in Q-Richtung macht die Formel entschieden einfacher:
Der Drehwinkel ist der Orientierungswinkel, auf den die Achsen D und Q bezogen sind
Der Gleichungssatz wurde mit Javascript implementiert.
Der Ausgangspunkt bildet hier ein Unterprogramm, dem eine Struktur mit den von Zeitschritt zu Zeitschritt zu übertragenden Zustandsgrößen, also den Strömen und den Flüssen.
Die Netzspannung in Ständerkoordinaten:Die Ströme in Feldkoordinaten: Die Ströme zeigen am Enfang ein Kurzes einschwingen. Der Magentisierungsstrom bleibt während der ganzen Zeit konstant. Beim Lastwechsel bricht der Ständerstrom in D-Richtung kurz weg, um danach wieder der Magentisierungsstrom zu erreichen. Durch die große Läuferzeitkonstante merkt davon der Magnetisierungstrom nichts.
Die Spannungen und Flüsse in Feldkoordinaten: Die Orientierung des Modells erfolgt ja auf den Hautpfluss. Da der Hauptfluss aber die Ständerfrequenz hat, liegen jetzt alle internen Größen in Gleichgrößen vor. Dies hat den sehr großen Vorteil, das ein normaler PI-Regler jetzt ausreicht, um alles zu regeln.
Die Ströme in Rotorkoordinaten: Sowohl für die Ständer- als auch für die Läuferströme gilt: da das Bezugssystem der Hautpfluss ist, gibt es nur elektrische Gleichgrößen.
Leistungen: Die Leistungen sind sehr übersichtlich. Die Klemmenleistung ist im motrischen Betrieb natürlich höher als die mechanische Leistung. Der Wert der Blindleistung ist das Inverse der bezogenene Hauptinduktivität.