Alles Wesentliche zum Ersatzschaltbild wurde schon beim Ersatzschaltbild Gamma-mechRot gesagt.
Die Orientierung erfolgt auf den negativen Hauptfluss in Q-Richtung, was zu dem angenehmen Effekt führt, dass die EMK und damit auch die Klemmenspannung in D-Reichtung liegt.
Die Gleichungen arbeiten alle "pu". Typische Werte:
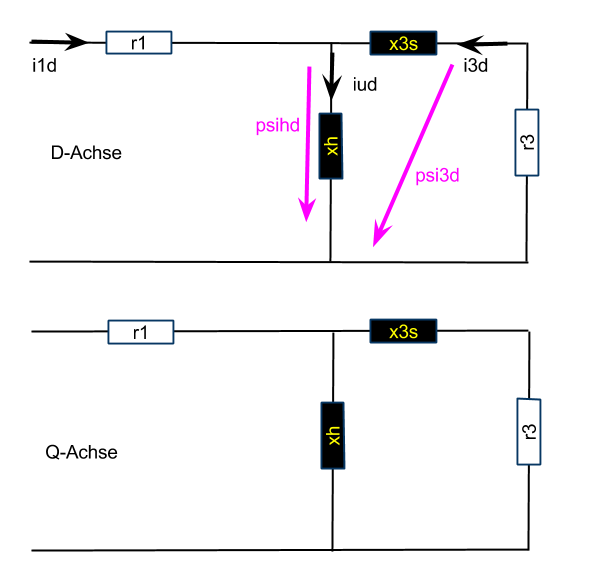
Das Modell orientiert auf den Hauptfluss in D-Richtung.
Die Frequenz ist die Frequenz des Orientierungssystems, die Ständerfrequenz \( \omega_s \). Es fallen natürlich die D-Anteile im Fluss weg.
Die Gleichungen sind quasi spiegelverkehrt mit den Gleichungen des Gamma-ESB in Psihd-Orientierung:
an den Läufergleichungen ändert sich nichts:
Läuferfluss, leicht modifiziert:
Hauptfluss
Den Hauptfluss gibt es nur in Q-Richtung.
Der Magnetisierungstrom in D-Richtung fällt weg.
================================================================
Auch ier kann man sich wieder de Frage stellen: "Muss das denn mit den Flüssen sein? Geht das nicht auch ohne?". Auch hier gilt: na klar gehts auch ohne Flüsse
Ausgangspunkt ist hier wieder die Flussgleichung:
und die Stromsummen:
Ständergleichungen:
Läufergleichungen:
Drehoment:
Verglichen mit dem invGam-ESB ist der entstehende Formelsatz alles andere als schön.
================================================================
Das Drehoment ist: M = Im{psi*conj(I)}
Der Drehwinkel ist der Orientierungswinkel, auf den die Achsen D und Q bezogen sind
Der Gleichungssatz wurde mit Javascript implementiert.
Der Ausgangspunkt bildet hier ein Unterprogramm, dem eine Struktur mit den von Zeitschritt zu Zeitschritt zu übertragenden Zustandsgrößen, also den Strömen und den Flüssen.
Die Netzspannung in Ständerkoordinaten:Die Ströme in Ständerkoordinaten: Die Ströme zeigen kurzes einschwingen. Da der Motor mit Nennlast betrieben wird, sind die Strangströme praktisch in Phase zur Netzspannung, da der Magnetisierungsstrom nicht weiter auffällt.
Die Spannungen und Flüsse in Feldkoordinaten: Der Fluss ist etwas größer als im T-ESB. Die EMK und damit auch die Klemmenspannung liegt in der Q-Ebene. Die Klemenspannung in D-Richtung ist praktisch 0.
Die Ströme in Feldkoordinaten: Da alle Ströme feldorientiert dargestellt sind, bilden die Ströme ein schönes Gleichsystem, dass sich gut regeln lässt.