Das Trapezverfahren
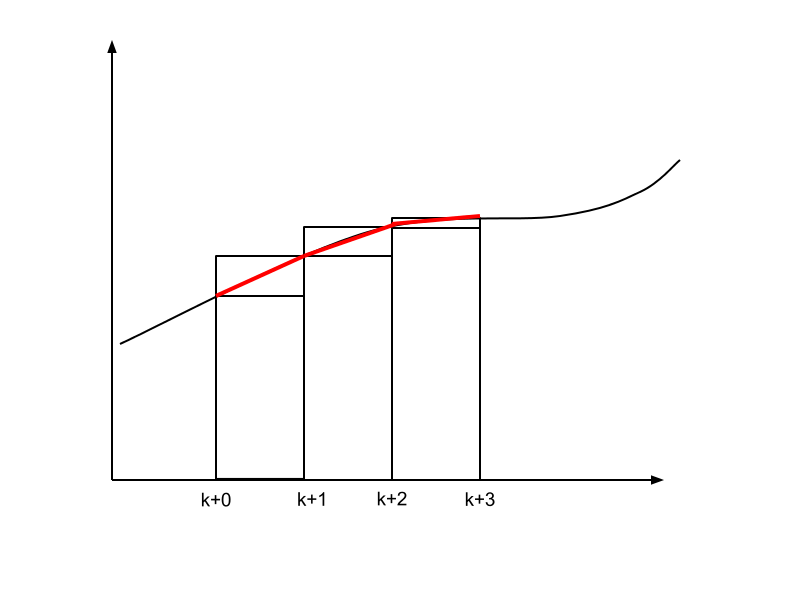
Jetzt kann man sich auch noch eine Trapez-Integration vorstellen. Dazu nimmt man den Mittelwert vom expliziten- und impliziten Euler Verfahren. Dadurch erreicht das Verfahren Konvergenzordnung 2 - eine Ordnung besser als expliziter und impliziter Euler.
\[ i_{k+1} = i_k + \frac{\Delta t}{2} \cdot f(t_k,i_k) + \frac{\Delta t}{2} \cdot f(t_{k+1},i_{k+1}) \]
Die Lösung ist grafisch ein Trapez :-)
mit
\[i0 = i(t_k) \] \[ i1 = i(t_{k+1}) \] \[e0 = E(t_k) \] \[ e1 = E(t_{k+1}) \]
wird daraus:
$$ i1 = i0 + \frac{\Delta t}{2} \cdot \frac{e0 - R \cdot i0}{L} + \frac{\Delta t}{2} \cdot \frac{e1 - R \cdot i1}{L} $$
Jetzt muss die Gleichung nach \( i1 \) umgestellt werden:
$$ i1 = \frac { 2 \cdot i0 \cdot L + \Delta t \cdot ( e0 + e1 - R \cdot i0 ) } { 2 \cdot L + \Delta t \cdot R } $$
Das Trapezverfahren erfordert einen großen Rechenaufwand. Von der Stabilität her ist das Verfahren so gut wie der implizite Euler, der Rechenaufwand ist aber um einiges höher.
Besonders deutlich wird das am zweiten Beispiel. Hier wird wiederum der explizite und implizite Euler zu Hilfe genommen:
expliziter Euler: \( \;\;\; A_1 \cdot \dot{x0} + B_1 \cdot x0 = C_1 \;\;\;\; \to \;\;\;\; \dot{x0} = A_1^{-1} \cdot (C_1-B_1 \cdot x0) \)
impliziter Euler: \( \;\;\; A_1 \cdot \dot{x1} + B_1 \cdot x1 = C_1 \;\;\;\; \to \;\;\;\; \dot{x1} = A_1^{-1} \cdot (C_1-B_1 \cdot x1) \)
Trapez: \( \;\;\; x1 = x0 + \frac {1}{2}\Delta t \cdot ( \dot{x0} + \dot{x1}) \)
Durch das Einsetzen der Lösungen des expliziten und impliziten Euler kann die Trapezformel umgestellt werden.
\( x1 = (2 \cdot A_1 + \Delta t \cdot B_1)^{-1} \cdot (2 \cdot A_1 \cdot x0 - \Delta t \cdot B \cdot x0 + 2 \cdot \Delta t \cdot C1) \)
Um diese Form in einer Integration zu verwenden, sollten sehr gute Gründe vorhanden sein. Der Implementierungsaufwand ist sehr hoch.