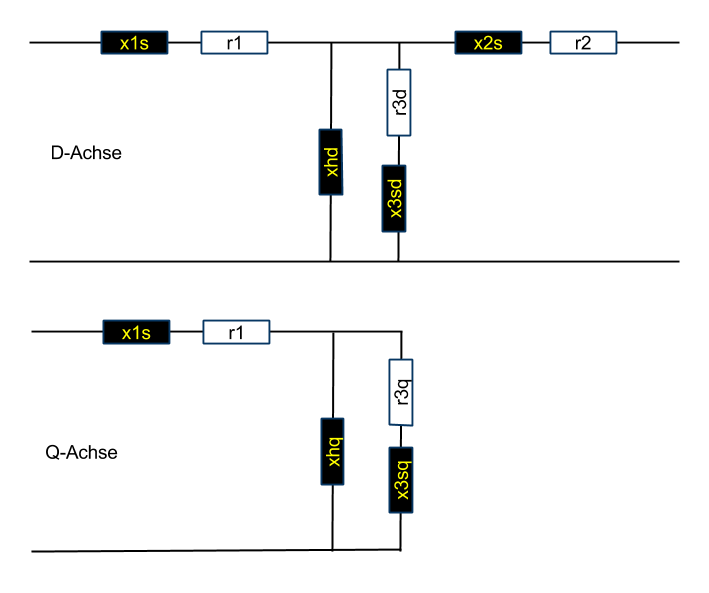
SYM, T-Ersatzschaltbild, dq-mech-rotororientiert, in pu
ACHTUNG: diese Seite verlangt einiges von der Javascript-Engine. Ich empfehle hier (ausnahmsweise) den Chromium.
Allgemeines
Die Maschine ist bei Generatoren als auch bei großen Lastmaschinen beliebt:
- Bei Generatoren, da ein Netz gestellt werden kann.
- Bei Lastmaschinen, da Synchronmaschinen eine sehr hohe Dynamik bei gutem Wirkungsgrad besitzen und gleichzeitig
einen geringeren Strangstrom/Umrichterstrom haben.
Die Synchronmaschine wird in
- Vollpolmaschine und
- Schenkelpolmaschine
aufgeteilt. Beide Maschinen können mit dem gleichen Ersatzschaltbild gerechnet werden. Die Maschinen unterscheiden
sich nur in der Parametrierung. Der Unterschied
zwischen beiden Varianten besteht vor allem in der Schenklichkeit des Läufers. Dies äußert sich vor allem in
der Hauptinduktivität der Maschinen. Eine Schenkelpolmaschine
hat durchaus ein Verhältnis von \( xh_q = 0.5 \cdot xh_d \). Eine Vollpolmaschine kommt typischerweise
auf ein Verhältnis von \( xh_q = 0.9 \cdot xh_d \).
Aufgrund der unterschiedlichen Werte für D- und Q-Achse, fällt eine andere, als die mechanische
Rotororientierung, schwer.
Die Synchronmaschine wird mechanisch in D- und Q-Achse unterteilt. Dabei bildet die D-Achse die Achse, in
der sich die Erregerwicklung befindet. Die Erregerwicklung liegt nur in D-Achse. Das Hauptfeld befindet sich im lastlosen
Zustand ebenfalls in der D-Achse. Wenn die Maschine allerdings Drehmoment erzeugt, dann wandert das Hauptfeld aus der
D-Achse raus, Richtung Q-Achse.
Bei einer Schenkelpolpaschine hat der Dämpfer in der Q-Achse einen geringeren Widerstand als in der D-Achse, da
ja zusätzlich noch die Erregerwicklung in den Anker eingebracht werden muss.
Insgesamt ist der Dämpfer einer Synchronnmaschine aber wesentlich schwächer ausgeprägt als der Dämpfer(der Kurzschlusskäfig :-) )
einer Asynchronmaschine.
Ein Dämpferstrom fliest nur bei Arbeitspunktänderungen. Zu diesen zählen auch Oberschwingungen. In der theoretischen Betrachtung
ist der Dämpfer im statischen Arbeitspunkt stromlos.
Mit der Dämpferstreuung verhält es sich ähnlich. Da der Dämpfer im Bereich der D-Achse schwächer ist, ist auch die Streuinduktivität höher.
Der Widerstand (in bezogenenen Größen) der Erregerwicklung ist wesentlich kleiner als der Widerstand der Ständerwicklung.
Hierbei spielt vor alle der geringere Durchmesser der Läuferwicklung verglichen mit der Ständerwicklung eine Rolle. Die
Erregerwicklung wird ständig mit Strom durchflossen und ist damit für den Gesamtwirkungsgrad mitverantwortlich.
Formelsatz
Die Gleichungen arbeiten alle "pu". Typische Werte:
- r1 (Ständerwiderstand) : 0.005 … 0.05
- xs1 (Ständerstreuung) : 0.03 … 0.15
- xhd (Hauptinduktivität-D) : 1 .. 2
- xhq (Hauptinduktivität-Q) : 0. .. 1
- r2d (Erregerwiderstand-D) : 0.01 … 0.03
- xs2d (Erregerstreuung-D) : 0.1 … 0.2
- r3d (Dämpferwiderstand-D) : 0.1 … 0.4
- r3q (Dämpferwiderstand-Q) : 0.1 … 0.2
- xs3d (Dämpferstreuung-D) : 0.2 … 0.8
- xs3q (Dämpferstreuung-Q) : 0.1 … 0.2
Die Orientierung des Modells ist mechanisch-rotororientiert.
Ständergleichungen:
Die Ständergleichungen sind die gleichen (Haha!) wie bei der Asynchronmaschine. Das ist auch nicht weiter verwunderlich,
da es keine wesentlichen Unterschiede im Ständer gibt.
- \( U1_d = r1 \cdot i1_d + \frac{ d{\Psi}1_d }{\omega_n \cdot dt} - n \cdot {\Psi}1_q \)
- \( U1_q = r1 \cdot i1_q + \frac{ d{\Psi}1_q }{\omega_n \cdot dt} + n \cdot {\Psi}1_d \)
Läufergleichungen:
Hier fangen wir am besten beim Dämpfer an. Die Gleichungen sind hier identisch zu Asynchronmaschine.
- \( 0 = r3_d \cdot i3_d + \frac{ d{\Psi}3_d }{\omega_n \cdot dt} \)
- \( 0 = r3_d \cdot i3_q + \frac{ d{\Psi}3_q }{\omega_n \cdot dt} \)
Die zweite Gleichung beschreibt einfach die Erregung. Da der Erregerwicklung nur in der D-Achse definiert sind,
sind die Gleichungsteile der Q-Achse 0. Eine etwaige Verkopplung des Erregerflusses mit dem Dämpferfluss gibt
das Ersatzschaltbild nicht her.
- \( U2_d = r2_d \cdot i2_d + \frac{ d{\Psi}2_d }{\omega_n \cdot dt} \)
- \( 0 = 0 \)
Flussgleichungen:
Ständerfluss
- \( {\Psi}1_d = x{\sigma}1 \cdot i1_d + {\Psi}h_d \)
- \( {\Psi}1_q = x{\sigma}1 \cdot i1_q + {\Psi}h_q \)
Die Flussverkettung im Läuferfluss wird jetzt deutlich. Auch der Erregerfluss geht in die Läufergleichungen ein.
- \( {\Psi}2_d = x{\sigma}2 \cdot i2_d + {\Psi}h_d \)
- \( {\Psi}3_d = x{\sigma}3 \cdot i3_d + {\Psi}h_d \)
- \( {\Psi}3_q = x{\sigma}3 \cdot i3_q + {\Psi}h_q \)
Hauptfluss
- \( {\Psi}h_d = xh \cdot i{\mu}_d \)
- \( {\Psi}h_q = xh \cdot i{\mu}_q \)
Stromsummen:
- \( i1_d + i2_d + i3_d = i{\mu}_d \)
- \( i1_q + \ \ \ \ \ \ \ \ \ \ \ i3_q = i{\mu}_q \)
Drehmoment:
Das Drehoment ist: M = Im{psi*conj(I)}
- \( M_{el} = {\Psi}h_d \cdot i1_q - {\Psi}h_q \cdot i1_d \)
Drehwinkel:
Der Drehwinkel ist der Orientierungswinkel, auf den die Achsen D und Q bezogen sind
- \( \frac{d\rho}{\omega_n \cdot dt} = n \)
Drehzahl:
- \( \frac{dn}{dt} = \frac{M_{el}-M_{Last}}{ {\tau}_J} \)
Realisierung in einer Programmiersprache
Der Gleichungssatz wurde mit Javascript implementiert.
Der Ausgangspunkt bildet hier ein Unterprogramm, dem eine Struktur mit den von Zeitschritt zu Zeitschritt zu übertragenden Zustandsgrößen, also den Strömen und den Flüssen.
Insgesamt muss man it der Simulation aber sehr vorsichtig sein. Der starke induktive Knoten in der D-Achse fordert seinen Tribut in kleinen
Zeitschritten. Insbesondere der hier verwendete explizite Euler kommt an seine Grenzen.
Die Netzspannung in Ständerkoordinaten:
Die Ströme in Ständerkoordinaten:
Die Ströme zeigen ein kurzes Einschwingen. Da der Motor mit Nennlast betrieben wird,
sind die Strangströme (i1_ab) praktisch in Phase zur Netzspannung, da der Magnetisierungsstrom
nicht weiter auffällt.
Die Spannungen und Flüsse in Rotorkoordinaten:
Die Flüsse der SYM werden mit dem Schlupf der Maschine mitgedreht. Der Fluss
hat die Ständerfrequenz, "hinkt" aber 90Grad nach. Auf das
Läuferkoordinatensystem bezogen (also das Bezugssystem dieses Formelsatzes)
hat der Fluss die Schlupffrequenz.
Die Ströme in Rotorkoordinaten:
Zum Zeitpunkt 0.5sec wird das Lastmoment mit einem Sprung aufgeschaltet. Hier reagiert die
Maschine erst mit einem kurzen Stromimpuls in der Q-Achse (i1_dq.b). Dieser Strom wird vom
Dämpfer in Q-Achse (i3_dq.b) aufgesaugt. Nach kurzer Zeit beginnt der Strom vom Q-Dämpfer
in die Hauptinduktivität zu wandern (psih_dq.b). Jetzt beginnt sich der Lastwinkel der
Maschine zu bewegen. Das Hauptfeld (psih) wandert von der D in die Q-Achse.
Erregung:
Der Erregerstromstromrichter kann nur im statischen Arbeitspunkt etwas ausrichten. Dies liegt
an der geringen Spannungsreserve für die der Stromrichter ausgelegt wird. Der Erregerstromstromrichter
wird überlicherweise auf die doppelte bis fünffache der benötigten Spannung vom Nennpunkt ausgelegt.
Wenn die Maschine ale einen Erregerwiderstand von 1% hat, dann hat der Stromrichter nur eine Ausgansspannung
von -5%..+5%. Mehr nicht. Wenn man also bei einem Laststoß mehr Erregerstrom für einen kleinen Lastwinkel braucht,
muss man das VORHER erledigen.
Durch den Lastsprung ändert sich auch der Hauptfluss in D-Achse. Dies verursacht widerum eine hohe Spannung.
Die Differenzspannung zwischen der Hauptinduktivität und der (externen) Erregerspannung ist massgeblich
für den sich dann einstellenden dynamischen Erregerstrom.
Leistungen:
Der Erregerstrom wird so geregelt, dass der Betrag des Hauptflusses seinen Nennwert (1) erreicht. Besonders
bei Lastsprüngen ist ein schnelles Nachregeln vom Erregerstrom wichtig. Der Lastwinkel zeigt an, wie weit sich der
Läufer schon aus der Flussachse "rausgedreht" hat. Ein Überschwingen vom Lastwinkel zeigt einen falsch eingestellten
Flussregler an.
Bei einem Lastwinkel >80Grad wird es unangenehm.